Il secondo anno del progetto: tutti gli aggiornamenti
Dopo i test intensivi del primo anno, piccoli problemi elettronici e meccanici sono emersi. Un robot legged sottomarino è sottoposto a continui impatti ed interazioni con l’ambiente, e le componenti possono cedere in vari modi: dei cavi si disconnettono, un cannister lasciato aperto nottetempo può generare delle ossidazioni, o le molle possono rompere il ginocchio del robot. Lavoriamo costantemente per raffinare le nostre progettazioni, e rendere SILVER2 sempre più affidabile!

Settembre 2019
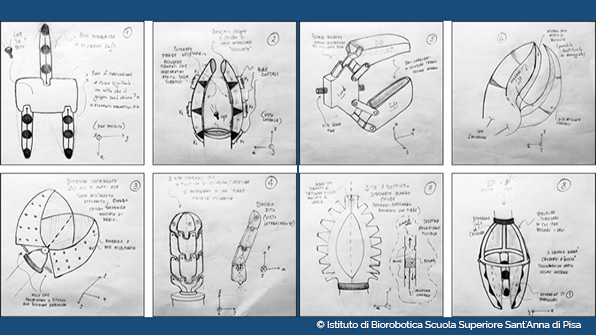
Il secondo anno di progetto è dedicato alla raccolta della macro-plastica dal fondale. Per fare questo, stiamo valutando varie soluzioni: un contenitore di raccolta a bordo del robot, una stazione di raccolta in fondale o altre idee. Ma la parte principale, è la mano che ci consentirà di raccogliere i rifiuti. Qui si possono vedere delle idee preliminari che stiamo valutando, per scegliere la più efficace.
Dicembre 2019
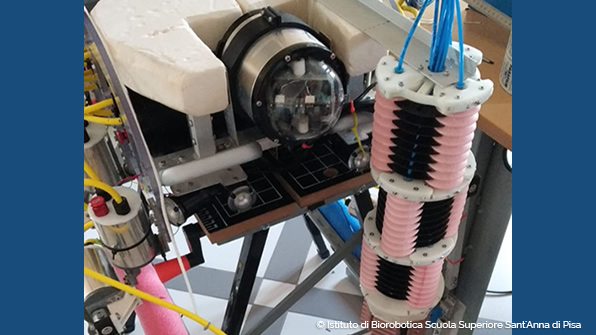
Mentre sviluppiamo la nostra idea, con l’Università di Beihang stiamo provando ad integrare un manipolatore flessibile direttamente su SILVER2! Il manipolatore è dotato di varie camere pneumatiche, e necessità di un’alimentazione esterna e di una elettronica dedicata. I test con questo braccio ci permetteranno di capire le potenzialità raggiungibili con questo sistema.

Ottobre 2019
Il braccio è stato montato sul robot, in posizione laterale rispetto alle camere, e una camera aggiuntiva è stata piazzata a lato. Con questa configurazione, sarà possibile verificare le prese durante le immersioni, e
tentare di raccogliere rifiuti ed altri oggetti dal fondale. Una piccola sacca di raccolta + stata montata sul robot, per permetterci di testare la fattibilità di una raccolta a bordo dei rifiuti.
Ottobre 2019
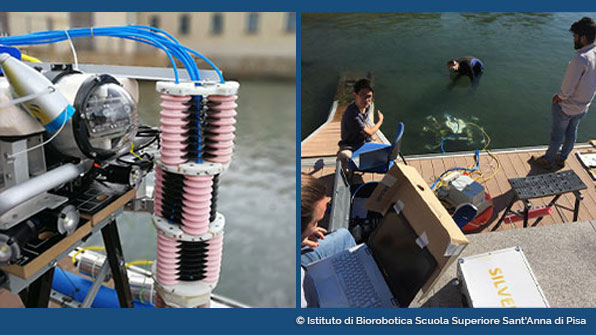
La sperimentazione è in corso! Le calde giornate dello scorso Novembre (2019) ci hanno permesso di trovare delle buone giornate (e altre meno buone!) per provare SILVER2 con l’integrazione del braccio dell’Università di Beihang. A volte la visibilità era veramente difficile a causa delle onde e della sabbia in sospensione…ma vogliamo stressare il nostro robot il più possibile!
Novembre 2019
Tra i vari oggetti testati, un guscio d’uovo e una bottiglia di plastica. Per questi oggetti, i test sono stati un grande successo: il manipolatore ha dimostrato le sue grandi capacità di destrezza, e anche di delicatezza. Entrambi gli oggetti sono stati raccolti con successo. Non riuscite a immaginare come si muove quel grosso braccio davanti al nostro robot? Ecco a voi un video per mostrarvi una parte delle operazioni di raccolta!

Novembre 2019
In questi esperimenti, ci siamo mossi verso l’oggetto da raccogliere sapendo orientativamente la sua posizione, e ci avviciniamo inizialmente molto rapidamente, per poi rallentare ed essere più precisi. Una volta in posizione, ecco che possiamo azionare il braccio per la presa dell’oggetto, e il suo posizionamento all’interno della sacca di raccolta.

Novembre 2019
Novembre 2019

Novembre 2019