Il secondo anno del progetto: tutti gli aggiornamenti
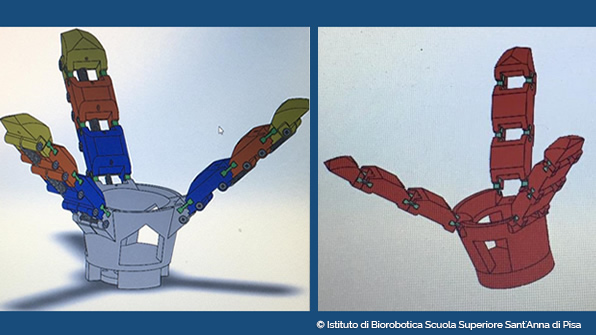
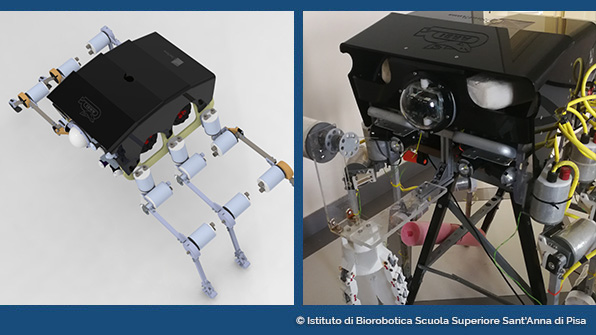
Delle varie idee, la scelta finale è ricaduta su delle dita antropomorfe, attuate con un singolo cavo, e dotate di molle e giunti flessibili per permettere un adattamento maggiore agli oggetti da prendere. Con il piazzamento radiale di tre dita, e una membrana che le collegherà (non mostrata in questa immagine) sarà possibile racchiudere delicatamente gli oggetti e trattenerli all’interno del palmo cavo.
Gennaio 2020
Marzo - Aprile 2020
Giugno 2020

Giugno 2020

Maggio 2020
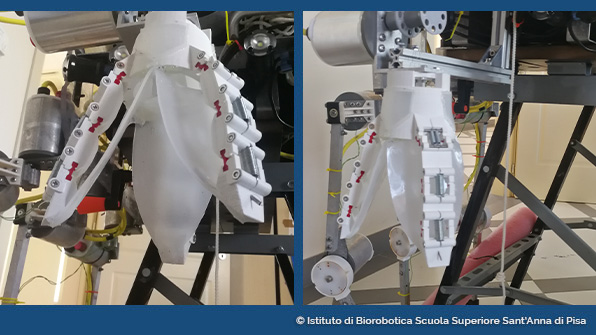
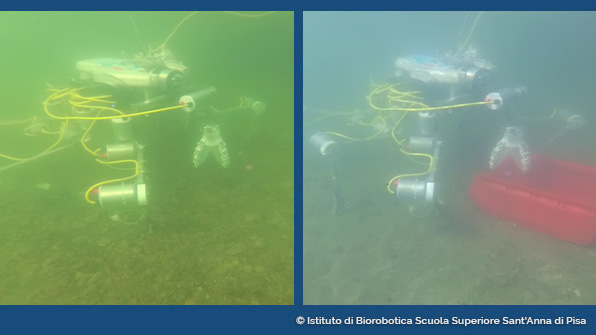
La mano è stata finalmente integrata a SILVER2. La sua posizione è frutto dell’esperienza delle prove precedenti, e l’architettura di SILVER+ sfrutterà una stazione di raccolta di rifiuti in fondale, per facilitare la deposizione e il rilascio degli oggetti (un’altra esperienza guadagnata con le prove di Novembre). Siamo pronti per le prime immersioni!
Giugno 2020
Tanti gli oggetti raccolti dalla nostra mano, e la conferma di poter aggiungere alle nostre capacità di raccolta e rilascio anche reti e sacchetti di plastica! Siete curiosi di vedere quale è il punto di vista dell’operatore, mentre pilota SILVER2 per la raccolta? Non perdetevi il video!

Luglio - Agosto 2020
Il robot in operazione, sfrutta la telecamera montata sulla parte frontale di SILVER2. Come vedete, la qualità delle immagini durante le operazioni non è ottimale: la corrente muove la sabbia e influenza la visibilità, la risoluzione è limitata dalla banda disponibile, e i colori sono cambiati dall’interazione dei raggi solari con l’acqua. Nonostante questo, le operazioni sono state un successo! Grazie alla mobilità delle camere, è possibile guardarsi intorno per individuare l’oggetto, e successivamente muoversi verso di esso. Una volta preso, è nuovamente il momento di guardarsi intorno per individuare punti di riferimento per la navigazione, individuare la stazione di raccolta, e posizionare il rifiuto al sicuro. Per ora il processo è lento e migliora di volta in volta: nel futuro, vorremmo integrare un GPS sottomarino (chiamato USBL) che ci consenta di guidare il nostro robot in maniera ancora più efficace e, idealmente, addirittura di effettuare la raccolta in maniera autonoma!
Luglio - Agosto 2020
L’operazione, dall’esterno, si divide in tre macro fasi: la ricerca dell’oggetto e l’avvicinamento del robot; la parte di raccolta, in cui il sistema di controllo cambia completamente sfruttando degli algoritmi di controllo parallelo; ed infine il trasporto verso la stazione di raccolta e il deposito del rifiuto al suo interno. Un esempio di questa procedura è mostrata nel video sotto.
Luglio - Agosto 2020
I tre step della pulizia, in maniera semplificata: la ricerca, la raccolta, e il deposito.
Luglio - Agosto 2020
Gli esperimenti sono proseguiti non solo a Livorno: con l’aiuto di Igor d’India e del suo progetto #abysscleanup, e con i ragazzi di #menkab_il_respiro_del_mare, abbiamo impacchettato SILVER2 (alle 4 del mattino!) e ci siamo mossi verso Savona per fare dei test di raccolta! Una levataccia necessaria, per provare efficacemente il robot!

Settembre 2020
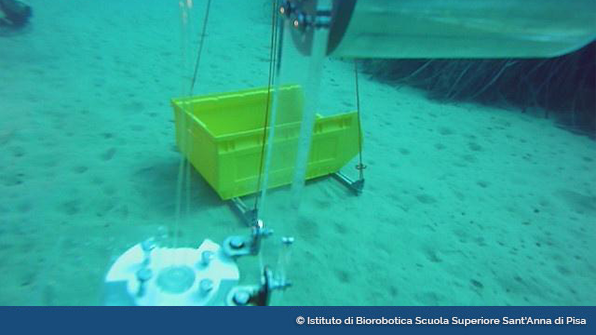
Gli esperimenti, inizialmente pensati a 10 metri di profondità, hanno taccato un picco di 15 metri. In queste condizioni, un subacqueo ha un tempo limitato, mentre SILVER2 può operare fino a tre ore, con il settaggio corrente. Per l’operatore, non c’è assolutamente possibilità di avere indizi diversi dalle camere del robot: la pulizia avviene in condizioni assolutamente realistiche. In questo caso, abbiamo usato una stazione di raccolta gialla: il colore delle stazioni è pensato per ottimizzarne la visibilità, sui diversi fondali.
Settembre 2020
Nonostante la profondità di 15 metri, la visibilità era magnifica! Queste immagini, riprese dalla camera del robot, danno l’idea di cosa l’operatore stia osservando durante le operazioni. Una volta individuati gli oggetti, sono stati raggiunti, presi, e depositati alla stazione di raccolta. Vari ostacoli, una giornata impegnativa e ancora delle sfide davanti a noi, ma un’ottima chiusura per il secondo anno del progetto Blue Resolution!

Settembre 2020
Contemporaneamente, la cover del robot è stata ridisegnata e realizzata, pronta per aumentare l’idrodinamicità, l’efficienza e, anche l’estetica di SILVER2.
Luglio - Settembre 2020